Преобразователь частоты. Выбор и расчет преобразователя частоты для электродвигателя
Многие электрические приборы, используемые как в хозяйственных, так и в промышленных целях, нуждаются в преобразователе частоты - приборе, который дает возможность изменять частотный импульс электрического тока, изменяя вместе с тем и его напряжение. Чаще всего такие приборы преобразовывают однофазный ток в трехфазный или наоборот, понижая (повышая) напряжение в диапазонах 220-380 В. Очень часто такие изделия применяются для регулировки скорости синхронного или асинхронного двигателя. Тем самым мотор может выполнять свои функции более эффективно, а результат получается хорошим.
Что из себя представляет частотный преобразователь?
Любой частотный преобразователь состоит из ряда схем, в состав которых входят транзистор, тиристор, а также микропроцессор, обеспечивающий управление электронными ключами силового типа. Современные модели обладают многочисленными дополнительными функциями, включая защиту, диагностику, а также комплексный контроль. Чаще всего в приборах сегодня используется принцип широтно-импульсной модуляции, который зарекомендовал себя как действенный и эффективный в практическом применении. Удобная система регулировки дает возможность выставить нужный тип исходящего напряжения и величины тока.
Что учитывать при выборе частотного преобразователя?
Чтобы подобрать для себя наиболее подходящую модель следует исходить из конкретных конструктивных особенностей моделей, а именно: его мощности, размера, веса, мобильности, наличия векторного или скалярного контроля за двигателем, типа электропривода и так далее. Вместе с тем нужно учитывать, что наличие специального датчика скорости - энкодера, который позволяет достичь требуемых показаний в плане требуемой эффективности.
Данный преобразователь частоты немецкого производства обладает встроенным дросселем, фильтром ЭМС, а также силовым разъединителем. Благодаря своей компактности и простому обслуживанию, такие устройства получили широкое распространение не только в промышленном, но и бытовом применении. Эффективная система охлаждения через тыльный канал дает возможность эксплуатировать аппарат практически без перерывов, причем с выдаваемым КПД до 98%.
Цена модели Danfoss VLT HVAC Basic Drive FC 101 5,5 кВт в России составляет порядка 48 тыс. руб.

Используемые модели преобразователей частоты Siemens отличаются высокой надежностью и универсальностью применения, включая вентиляторы, насосы, компрессора, транспортеры и так далее. Имея диапазон напряжений 208-240 В +/-10% 380-480 В +/-10%, КПД моделей составляет порядка 97%. Вместе с тем комплексная система торможения, включающая в себя динамический, комбинированный и генераторный надежно защищает аппарат от перегрева, блокировки и короткого замыкания.
Стоимость модели Siemens 6SE6420-2AC23-0CA1 составляет около 24 тыс. руб.

Современные устройства бренда MICROMASTER отличаются инновационной конструкцией, микропроцессорной системой управления, а также низким уровнем шума при работе. Благодаря широтно-импульсной модуляции, а также IGBT транзисторам, многие устройства данной компании применяются для защитных функций. Имея 2 аналоговых входа, 8 дискретных входов, модульную конструкцию, а также внешние опции для обмена данными, такие преобразователи частоты зарекомендовали себя очень хорошо.
Цена модели MICROMASTER 420 составляет 12,2 тыс. руб.
Как самому сделать выносной пульт и подключить частотный преобразователь (видео)
Фото: kub-privod.ru, nasos-reduktor.fis.ru, fainaidea.com

Антиарис (bonkonko) Семейство: Морозовые Коммерческие названия: bonkonko (Германия и Нидерланды); кирунду (Франция). Другие названия: oro, ogiovu (Нигерия); ех ен ех ен (Гана); кирунду (Уганда); ако (Берег Слоновой Кости); андум (Габон); цангу (Конго); акече (Сьерра-Леоне). Распространение: Западная, Центральная и Восточная Африка. Описание древесины Антиарис Сердцевина древесины от кремового до желто-серого цвета. Текстура от средней до грубой,…

Анингерия (включая 5 подвидов) Семейство: Сапотовые Коммерческое название: ancgré (Великобритания и США). Другие названия: aninģuerie, anicģre (Берег Слоновой Кости); ландосан (Нигерия); муна (Кения); осан (Уганда); мукали, кали (Ангола). Распространение: Западная Африка; Восточная Африка; Восточная Африка; Танзания. Описание древесины Анингерия Сердцевина древесины кремово-коричневого цвета с розоватым оттенком. Узор, обычно, – прямые линии, однако, встречаются волны, пятнистость….

Мангал для дачи – отличная идея, он подойдет для пикника, позволит вкусно приготовить шашлык либо картошку с овощами. В магазинах предлагаются различные варианты и при подборе учитываются факторы: Используемый материал. Размеры конструкции. Тип сборки. Материал товара. В магазинах покупатели обращают внимание на металлические мангалы, однако они могут делаться из чугуна, стали либо специальных сплавов. Если…

Андироба (Карапа) Семейство: Мелиевые Другие названия: крабвуд (Гайана); краппа (Суринам); фигероа (Эквадор); караполе (Гваделупа); карапа (Гвиана); камакари (Бразилия); масабало (Колумбия). Распространение: Карибский бассейн, Центральная и Южная Америка. Описание древесины Андироба Древесина имеет цвет от красного до светло-красного, темнеет при сушке. Фактура, в основном, гладкая, однако, иногда переплетается с рябью в более плотной ткани, создавая фигуру…

Амбойна (Нарра) Семейство: Бобовые Коммерческие названия: розовое дерево (Филиппины, Папуа – Новая Гвинея). Саженцы продаются под торговым названием AMBOYNA BURR. Другие названия: красная нарра, желтая нарра, сена, ангсена. Распространение: Ост-Индия. Описание древесины Амбойна Сердцевина дерева варьируется от светло-желтого, золотисто-коричневого до кирпично-красного цвета. Древесина родом из Кагаяна обычно тверже и тяжелее, она кроваво-красного цвета. Амбойна обладает…
Одним из важных направлений снижения энергопотребления является внедрение энергосберегающего оборудования, к которому в первую очередь относится частотно-регулируемый электропривод (ЧРП) - асинхронный электродвигатель, управляемый от преобразователя частоты.
Для начала ответим на вопрос, Что такое преобразователь частоты и Зачем нужен частотный преобразователь?
Успешное внедрение частотных преобразователей для решения различных технологических задач, объясняется в первую очередь обширным распространением асинхронных электродвигателей (до 90% рынка) отличающихся простотой конструкции, высокой надежностью, дешевизной, легкостью подключения и т.д.
Но данным электродвигателям также присущи и некоторые недостатки, снижающие их область применения или делающих их менее эффективными. К ним можно отнести – невозможность плавного регулирования частоты вращения ротора и как следствие неэкономичное применение при определенных задачах, существенные пусковые токи и т.д.
Для устранения вышеописанных недостатков асинхронных электродвигателей и были разработаны частотно регулируемые электропривода.
Частотно-регулируемый привод (частотно-управляемый привод) - система управления частотой вращения ротора асинхронного (или синхронного) электродвигателя. Состоит собственно из электродвигателя и преобразователя частоты (ПЧ).
Правильный выбор преобразователя частоты позволит сократить текущие производственные расходы и, одновременно, повысить производительность технологического оборудования.
Преимущества использования частотных преобразователей
- экономичное потребление энергоресурсов;
- минимальные затраты на техническое обслуживание при соблюдении требований, установленных производителем;
- повышение качества оперативного управления действующими мощностями;
- постоянный контроль за важными технологическими процессами;
- увеличение эксплуатационного ресурса электроприводов и другой сложной техники, в среднем, на 35%.
Критерии выбора
К сожалению, четкого перечня критериев, позволяющих выбрать преобразователь частоты , не существует. Это объясняется спецификой разных типов промышленного оборудования. Для каждой единицы техники, эксплуатируемой на заводах, фабриках, предприятиях малого бизнеса, действуют свои условия и ограничения. Поэтому выбор технических параметров преобразователя частоты в каждом случае индивидуален.
Ключевой критерий – тип исполнительного механизма. Сориентироваться в остальных параметрах помогут универсальные рекомендации, приведенные ниже.
Мощность
Важнейшим параметром электропривода является его мощность. Именно поэтому перед тем, как выбрать частотный преобразователь для электродвигателя, следует определиться с нагрузочной способностью оборудования. Мощностные показатели ПЧ должны соответствовать значению номинальной мощности двигателя. При этом нагрузка на валу не должна подвергаться динамическим изменениям. Другими словами, частотник подбирается, исходя из следующих параметров:
- максимального значения тока, потребляемого электроприводом от частотника;
- перегрузочной способности преобразователя;
- планируемого типа нагрузки;
- уровня, длительности и частоты появления перегрузок.
Питающее напряжение
Не менее важным является и такой показатель, как питающее напряжение. Как правило, оборудование запитывается от трехфазной промышленной электросети напряжением 380 В. Также встречаются приводы, адаптированные для работы от однофазной сети 220/240 В.
Кроме того, на данный момент в каталогах производителей имеются модернизированные серии приводов, предназначенные для эксплуатации в высоковольтных сетях. Мощность такого оборудования измеряется в мегаваттах.
Диапазон регулирования
В случае, когда показатели скорости вращения электродвигателя не опускаются ниже 10% от номинала, подбор преобразователя частоты не предусматривает соблюдения каких-либо специальных условий. Однако в ситуации, требующей дальнейшего снижения скорости при соблюдении номинального крутящего момента на валу, важно убедиться в том, что ПЧ сможет обеспечить работу на частотах, приближенных к нулю.
Режим торможения
Инерционное торможение по своим характеристикам схоже с отключением электродвигателя от питающей сети. Оба процесса могут занять немало времени, но, правильно подобрав преобразователь частоты и опции к нему, можно выполнить останов или торможение двигателя с переходом на более низкую скорость за короткий промежуток времени.
Способы управления электродвигателем
Ряд механизмов предусматривают эксплуатацию с управлением от задающего сигнала при условии плавного изменения оборотов электрического двигателя. Иногда необходима работа на фиксированных скоростях. Оба этих момента предусматривают управление как с пульта управления преобразователя частоты, так и с применением клемм цепей управления ПЧ, кнопок, потенциометров, переключателей, устройств автоматики.
Все вышеперечисленные аспекты выбора частотника не являются исчерпывающими. При подборе также важно учитывать наличие функции индикации параметров, полноту защитных функций, особенности монтажа и установки ПЧ, возможность автоматической настройки, условия использования устройства, наличие различных интерфейсов связи.
Другие полезные материалы:
- В том случае, если при выборе пользователь ошибся с мощностью, и она оказалась завышена, преобразователь не сможет защитить двигатель от возможного перегруза, скачков напряжения и прочих факторов.
- Меньшая мощность не создаст условия для хорошей эффективности машины. Преобразователь с небольшой мощностью не сможет обеспечить высокую динамику рабочего режима насосной установки. Возникающие периодически перегрузки могут послужить причиной неисправности.
Факторы, на которые обращают внимание при выборе
Условия эксплуатации устройства являются существенным фактором, влияющим на сроки эксплуатации электродвигателя. Поэтому, выбирая , нужно обратить внимание на такие факторы:
- границы рабочих скоростей электрического двигателя;
- рабочие границы моментов вращения;
- характер нагрузки;
- циклограмму работы.
Все характеристики взаимосвязаны между собой. Так, нагрузка имеет несколько типов и связана с такими характеристиками, как скорость, момент и пусковой момент. Она бывает:
- функциональной или служит для подъема грузов, например, мостовой кран, электродвигатель может быть подключен от ПЧ;
- нагрузка с передачей и накоплением энергии.
Скорости вращения и момента связаны со скоростью, моментом и параметрами времени, они зависят от следующих характеристик:
- величина постоянного момента;
- постоянная величина скорости;
- уменьшающееся число крутящего момента;
- уменьшающаяся скорость.
Характер нагрузки зависит от таких показателей, как:
Особенности при расчете ПЧ для электродвигателя
Прежде, чем выбрать преобразователь частоты выполняют выбор и расчет преобразователя частоты для электродвигателя. Обязательно обращают внимание на продолжительность скоростных режимов, в том числе и на повторно-кратковременный режим. Необходимо принимать во внимание мгновенную величину максимального тока и на длительность постоянного тока на выходе с преобразователя.
Важно учитывать максимальную и номинальную частоту. Принимается во внимание мощность или импендас силового распределительного трансформатора вместе с проводами линии электропередач или кабельной линией. Источник питания влияет на и насосной установки, длина питающей линии оказывает влияние на потери напряжения. Учитываются возможные скачки напряжения, возможный перекос фаз при неравномерной нагрузке, влияющий на фазный дисбаланс.
Учитываются такие факторы, как механическое трение, потери в проводнике и изменение рабочего цикла.
Выбор частотных преобразователей на насосы
Важно произвести правильный расчет преобразователя частоты и совмещение его с насосной установкой. Расчет будет влиять на правильный выбор преобразователя. От этого зависит его эффективность и долговечность использования, как самого преобразователя, так и электропривода (насосной установки) полностью.
Как выбрать ПЧ перед тем, как его купить
Перед тем, как выбрать частотный преобразователь,проверяют электрическую совместимость с двигателем и нагрузочной способностью (мощностью).
Рис. №1. Структурная схема работы системы VFD.
При работе преобразователя выбор проводят в зависимости от паспортных характеристик. При выборе учитываются такие показатели, как:
- Мощности по паспорту ПЧ и электродвигателя должны быть равными. Этот параметр действует в случае использования двигателей с двумя парами полюсов (2p=4), со скоростью вращения до 1500 об/мин, с постоянным моментом. Он же действует и для ПЧ, которые могут справиться с перегрузом в 150% (конвейеры, транспортерные ленты) и для преобразователей, работающих с перегрузом 120% (вентиляторы, центробежные насосы).
- Величина номинального тока должна быть равной и быть больше продолжительного фактического тока, который потребляется двигателем (тока нагрузки).
Важно: потребляемый двигателем ток должен быть меньше номинального тока преобразователя частоты, приведенного в спецификации.
Время разгона двигателя при пусковом токе 150% составляет 120% для преобразователей, специализирующихся в насосных агрегатах, от номинального ПЧ обычно не должно превышать 60сек.
- Входное напряжение сети должно удовлетворять преобразователь, он должен сохранять свою работоспособность при любых отклонениях напряжения от нормы.
- Диапазон регулирования частот, который может поддерживать преобразователь должен удовлетворять высокоскоростному режиму двигателя.
- Наличие дискретных входов управления необходимо для ввода различного рода команд, запрограммированных пользователем. Нужны и аналоговые, служат для ввода сигналов задания и для обратной связи. Необходимы и цифровые входы, служащие для высокочастотных сигналов, поступающих от энкордеров или цифровых датчиков скорости и положения.
- Число выходных сигналов служат для создания сложных схем для системы насосных станций.
- Возможность оперативного управления в рабочем режиме, это могут быть входы управления с помощью пульта. Или управление с помощью шины последовательной связи посредством контроллера или компьютера. Может быть это будет комбинированное управление.
- Выбор преобразователя зависит от предпочтения способа управления электродвигателем, . Зависит раздельного векторного управления двигателями или скалярное управление – поддержание одного постоянного отношения выходного напряжения к выходной частоте. Для насосных агрегатов более свойственен способ векторного управления.
- К более точным критериям выбора , определяющий работу двигателя на установившейся скорости. При работе преобразователя с одним двигателем необходимая мощность для запуска рассчитывается по формуле:
Рис. №2. Формула расчета полной пусковой мощности.
Ток потребления двигателем от преобразователя при сетевом напряжении 220/380В рассчитывают по формуле:

Рис. №3. Расчет механических характеристик двигателя.
Важно: Руководствуясь требованием, как правильно выбрать преобразователь частоты по токовым характеристикам, требуется соответствие ПЧ всем нормам и требованиям, но нормами по мощности разрешается пренебречь.

Рис. №4. Таблица неравенств, которые необходимо соблюдать при выборе ПЧ для работы одного частотника с несколькими двигателями.
Преимущества применения частотного преобразователя

Рис.№5. Преимущества выбора частотного преобразователя
К достоинствам частотного преобразователя относятся несколько важных качеств:
- Снижение пускового тока до фактической рабочей величины. Условия питания электрического двигателя напрямую от сети и питание от преобразователя отличаются. В первом случае, пусковой ток увеличивается не менее, чем в семь раз от номинального значения тока двигателя. Плавный пуск с постепенным плавным нарастанием частоты сетевого напряжения питания двигателя может быть понижен до фактического, потребляемого двигателем в установившемся рабочем режиме. Достигается это установкой времени разгона, если необходимо разогнать инерционную нагрузку преобразователь может обеспечить большую мощность, чем мощность двигателя.
- Существуют модели преобразователей, максимально ориентированных для работы на нагрузку с переменным моментом, а именно, для насосных станций, укомплектованных центробежными насосами. Номинальный ток преобразователя может быть более, чем на две ступени выше паспортных показателей двигателя.
- для запуска насосных агрегатов дает экономию электроэнергии минимум 30%.
Недостатки векторных частотных преобразователей:
- Сложность настройки векторного преобразователя, необходима консультация специалиста. Производится учет параметров электродвигателя, в том числе и индуктивности.
- Технология использования электропривода должна подразумевать 100% точность, только в этом случае оправдан выбор ПЧ.
- Выбирая векторный преобразователь, нужно не забыть перейти со скалярного режима.
- Высокие требования к точности измерительных приборов и датчиков тока, что сказывается на стоимости.
- Векторный ПЧ желательно использовать для конкретного электродвигателя.
Выбор преобразователя частоты
При определении характеристик преобразователя частоты для заданной нагрузки первым шагом является рассмотрение нагрузочных характеристик. Существуют четыре различных способа расчета требуемых выходных параметров, при этом выбор способа зависит от характеристик электродвигателя.
Нагрузочные характеристики
Прежде чем определить типоразмер преобразователя частоты, необходимо провести различие между двумя наиболее широко используемыми нагрузочными характеристиками. Нагрузочные характеристики различаются между собой следующим образом:
Рис. 1. Постоянный и квадратичный нагрузочный момент
Когда скорость центробежных насосов и вентиляторов увеличивается, потребляемая мощность возрастает в третьей степени (Р = n 3).
Обычный рабочий диапазон центробежных насосов и вентиляторов лежит в пределах скоростей от 50 до 90 %. Коэффициент нагрузки возрастает пропорционально квадрату скорости, т. е. приблизительно от 30 до 80 %.
Оба эти фактора проявляются в характеристиках крутящего момента электродвигателя, управляемого преобразователем частоты.
На рис 2 и 3 показаны характеристики крутящего момента для двух типоразмеров преобразователей частоты, один из них (рис. 3) имеет меньший диапазон мощности, чем другой. Для обеих характеристик крутящего момента были заданы одинаковые нагрузочные характеристики центробежного насоса.
На рис. 2 весь рабочий диапазон насоса (0-100 %) находится в пределах номинальных значений параметров двигателя. Поскольку обычный рабочий диапазон насоса находится в пределах 30-80 %, можно выбрать преобразователь частоты с меньшей выходной мощностью.

Рис. 2. Преобразователь частоты большой мощности
Рис. 3. Преобразователь частоты малой мощности
Если нагрузочный момент постоянен, электродвигатель должен быть способен развивать крутящий момент, превышающий нагрузочный момент, поскольку избыточный крутящий момент используется для разгона.
Для разгона и обеспечения высокого начального момента, например в случае привода ленточных транспортеров, достаточен кратковременный перегрузочный момент, составляющий 60 % от момента, развиваемого преобразователем частоты. Перегрузочный крутящий момент также обеспечивает системе способность преодолевать внезапные увеличения нагрузки. Преобразователь частоты, который не допускает никакого перегрузочного момента, должен выбираться таким образом, чтобы ускоряющий крутящий момент (T B) находился в пределах номинального крутящего момента.
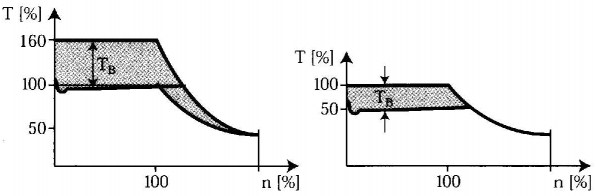
Рис. 4. Перегрузочный крутящий момент используется для разгона
При определении нагрузочных характеристик рассматриваются четыре разных набора технических характеристик электродвигателя, позволяющие принять решения относительно выбора типоразмера преобразователя частоты по мощности.
1. Преобразователь частоты можно выбрать быстро и точно на основе значения тока l M , который потребляет электродвигатель. Если электродвигатель загружается не полностью, его ток может быть измерен при работе аналогичной системы с полной нагрузкой.

Рис. 5.
Электродвигатель 7,5 kW, 3 х 400 В потребляет ток 14,73 А.
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь, у которого длительный максимальный выходной ток больше или равен 14,73 А при постоянной или квадратичной характеристике крутящего момента.
Примечание:
Если преобразователь частоты выбирается на основе мощности (способы 2-4), необходимо сравнить расчетную мощность и мощность, указанную в технических данных преобразователя частоты, при одном и том же напряжении. Если преобразователь частоты рассчитывается на основе тока (способ 1), этого не требуется, поскольку выходной ток преобразователя частоты влияет на другие данные.
2. Преобразователь частоты можно выбирать на основе полной мощности S M , потребляемой электродвигателем и полной мощности, подаваемой преобразователем частоты.

Рис. 6.
Пример расчета и выбора преобразователя частоты:
Электродвигатель 7,5 kW, 3x400 В потребляет ток 14,73 А. Sm =U х I х √3 / 1000 = 400 х 14.73 √3 / 1000= 10,2 кВА
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь частоты, у которого длительная максимальная выходная мощность больше или равна 10,2 кВА при постоянной или квадратичной характеристике крутящего момента.
3. Преобразователь частоты можно также выбирать по мощности Р м, вырабатываемой электродвигателем. Однако данный способ является неточным, поскольку cos φ и коэффициент полезного действия η изменяются с нагрузкой.
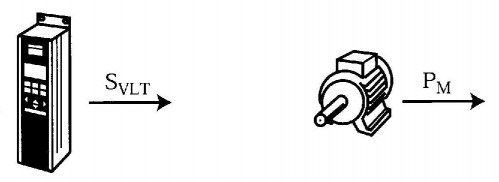
Рис. 7.
Пример расчета мощности электродвигателя
Электродвигатель мощностью 3 кВт, имеющий cos φ = 0,80 и η = 0,81, потребляет мощность S M = P M /(η х cos φ) = 3,0 / (0,80 х 0,81)=4,6 кВА
Что касается технических данных преобразователя частоты, то выбирается такой преобразователь, у которого длительная максимальная выходная мощность больше или равна 4,6 кВА при постоянной или квадратичной характеристике крутящего момента.
4. На практике номинальная мощность большинства преобразователей частоты соответствует стандартной серии асинхронных электродвигателей. Поэтому преобразователи частоты часто выбирают исходя именно из этого соображения, что, однако, может привести к неточному определению их характеристик, особенно если электродвигатель не нагружается полностью.
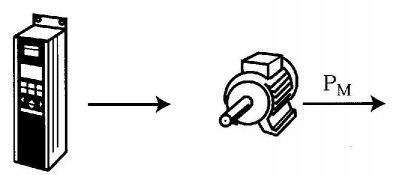
Рис. 8.
Распределение тока в преобразователе частоты (cos φ (фи) электродвигателя)
Ток для намагничивания электродвигателя подается конденсатором, находящимся в промежуточной цепи преобразователя частоты. Ток намагничивания представляет собой реактивный ток, который протекает между конденсатором и электродвигателем (рис. 9).

Рис. 9. Токи в преобразователе частоты
Из сети поступает только активный ток (l W). Именно поэтому выходной ток преобразователя частоты всегда больше входного тока. Кроме активного тока из сети потребляется ток I loss , (ток потерь).
Пример расчета
При отсутствии нагрузки ток 4-полюсного электродвигателя мощностью 1,1 кВт равен 1,6 А. Выходной ток подключенного преобразователя частоты составляет около 1,6 А, а входной ток при работе без нагрузки почти равен нулю.
Изготовители электродвигателей обычно указывают cos φ электродвигателя при номинальном токе. При меньшем значении cos φ (например, в случае реактивного синхронного электродвигателя) номинальный ток электродвигателя при одинаковых значениях мощности и напряжения будет больше, как видно из следующего уравнения:
I S = I W / cos φ
Если преобразователь частоты выбирается по номинальному току электродвигателя (способ 1), то снижения номинального крутящего момента электродвигателя не происходит.
Конденсатор, подключенный к клеммам электродвигателя для компенсации реактивного тока, необходимо удалить. Ввиду высокой частоты коммутации преобразователя частоты конденсатор ведет себя как короткозамкнутая цепь и вызывает существенное увеличение тока электродвигателя. Преобразователь воспримет это как замыкание на землю или короткое замыкание и отключится.
Управление скоростью электродвигателя
Выходная частота преобразователя частоты и, следовательно, скорость электродвигателя управляются одним или несколькими сигналами (0-10 В, 4-20 мА или импульсами напряжения). Когда подается сигнал на увеличение скорости, скорость электродвигателя возрастает, и вертикальная часть характеристик крутящего момента электродвигателя сдвигается вправо (рис. 10).
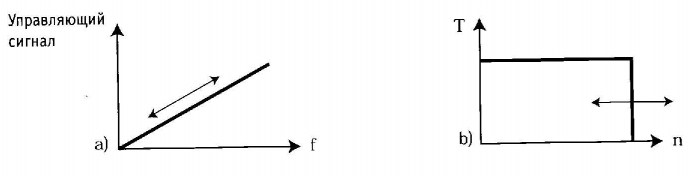
Рис. 10. Зависимость между управляющим сигналом и характеристиками крутящего момента электродвигателя
Если нагрузочный момент меньше, чем номинальный крутящий момент электродвигателя, скорость достигнет требуемого значения. Как показано на рис. 11, нагрузочные характеристики пересекаются с характеристиками крутящего момента электродвигателя в вертикальной части (в точке А). Если пересечение происходит в горизонтальной части (точка В), скорость электродвигателя не может длительное время превышать соответствующее значение, Преобразователь частоты допускает превышение предельного тока короткого замыкания без отключения (точка С), но продолжительность превышения обязательно должна быть ограничена по времени.
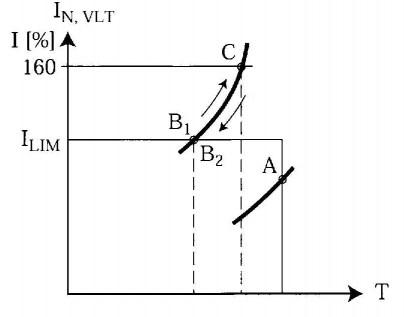
Рис. 11. Ток электродвигателя может в течение короткого времени превышать предел по току
Рампы разгона и торможения
Характеристика (рампа) разгона показывает темп, с которым происходит увеличение скорости вращения, и задается в виде времени разгона t acc . Эти рампы базируются, главным образом, на номинальной частоте электродвигателя, например, рампа разгона 5 с означает, что преобразователю частоты потребуется 5 секунд для перехода от нулевой до номинальной частоты электродвигателя (f = 50 Гц).

Рис. 12. Время разгона и торможения
Рампа торможения показывает, насколько быстро снижается скорость. Она задается в виде времени торможения t dec .
Возможен непосредственный переход от разгона к торможению, поскольку электродвигатель всегда отслеживает выходную частоту инвертора.
Если известен момент инерции вала электродвигателя, можно вычислить оптимальные значения времени разгона и торможения.
t acc = J x (n 2 -n 1)/[(T acc – T fric) x 9,55]
tdec = J x (n 2 -n 1)/[(T acc + T fric) x 9,55]
J - момент инерции вала электродвигателя.
T fric – момент трения системы.
Т асс - избыточный (перегрузочный) момент, используемый для разгона.
T dec - тормозящий момент (момент торможения), который возникает при уменьшении задания скорости.
n 1 и n 2 - скорости вращения на частотах f 1 и f 2 .
Если преобразователь частоты допускает кратковременный перегрузочный момент, то моменты разгона и торможения устанавливаются равными номинальному крутящему моменту электродвигателя Т. На практике время разгона и время торможения обычно одинаковы.
Пример расчета
J = 0,042 кгм 2 , T fric = 0,05 x M N , n 1 = 500 об/мин, n 2 = 1000 об/мин, Т N = 27 Нм
tacc = J х (n 2 – n 1)/ [(Т асс - T fric) х 9,55] = 0,042 х (1000 - 500)/ [(27,0 - (0,05 х 27,0)) х 9,55] = 0,1 [с]
Динамическое торможение
Когда сигнал задания скорости снижается, электродвигатель ведет себя как генератор и тормозит. Замедление при торможении зависит от величины нагрузки электродвигателя.
Электродвигатели, подключенные непосредственно к сети, отдают мощность торможения обратно в сеть.
Если электродвигатель работает от преобразователя частоты, энергия торможения сохраняется в промежуточной цепи преобразователя частоты. Если мощность, выделяемая при торможении, велика и преобразователь частоты не может рассеять ее за счет собственной конструкции, напряжение промежуточной цепи возрастает.
Напряжение промежуточной цепи может расти до тех пор, пока преобразователь частоты не будет отключен средствами защиты, и иногда к промежуточной цепи приходится подключать нагрузку в виде тормозного модуля и внешнего резистора для поглощения мощности торможения.?
Использование тормозного модуля и тормозного резистора позволяет осуществлять быстрое торможение при больших нагрузках. Однако, при этом возникают проблемы, связанные с нагревом. Другим решением является использование блока рекуперативного торможения. Такие блоки применяются для преобразователей частоты с неуправляемым выпрямителем и возвращают энергию торможения в питающую сеть.
В преобразователях частоты с управляемыми выпрямителями мощность торможения может возвращаться в сеть (см. рис. 13) с помощью, например, инвертора, подключенного к выпрямителю встречно-параллельно.
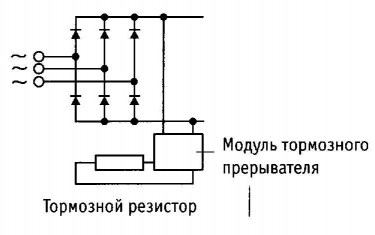
Рис. 13. Включение тормозного модуля и тормозного резистора

Рис. 14. Инвертор, включенный встречно-параллельно
Другой способ торможения электродвигателя - торможение постоянным током. Для создания магнитного поля в статоре используется напряжение постоянного тока, подаваемое между двумя фазами электродвигателя. Поскольку энергия торможения остается в электродвигателе и возможен перегрев, торможение постоянным током рекомендуется использовать в диапазоне низких скоростей, чтобы не превышать номинальный ток электродвигателя. Обычно торможение постоянным током ограничивается во времени.?
Реверс
Направление вращения асинхронных электродвигателей определяется порядком следования фаз питающего напряжения.
Если поменять местами две фазы, направление вращения электродвигателя изменится, и он будет вращаться в противоположном направлении.
Большинство электродвигателей сконструировано таким образом, чтобы заставить вал двигателя вращаться по часовой стрелке, если соединение выполнено следующим образом:

Рис. 15. Направление вращения электродвигателя изменяется путем изменения порядка следования фаз
Этому же правилу отвечает и порядок следования фаз на выходных клеммах большинства преобразователей частоты.
Преобразователь частоты может осуществлять реверс электродвигателя путем изменения порядка следования фаз с помощью электроники. Реверс производится либо путем задания отрицательной скорости, либо цифровым входным сигналом. Если при первоначальном вводе в эксплуатацию требуется, чтобы электродвигатель имел определенное направление вращения, необходимо знать заводскую настройку преобразователя частоты по умолчанию.
Поскольку преобразователь частоты ограничивает ток электродвигателя номинальным значением, двигатель, управляемый преобразователем частоты, можно реверсировать чаще, чем двигатель, подключенный непосредственно к сети.

Рис. 16. Тормозной момент преобразователя частоты во время реверса
Рампы
Все преобразователи частоты имеют функции изменения скорости (рампы) для обеспечения плавной работы. Эти рампы можно изменять, и благодаря им задание скорости можно увеличивать или уменьшать в определенном интервале.

Рис. 17. Регулируемое время разгона и торможения
Угол наклона характеристики разгона/торможения (длительность разгона/торможения) можно установить таким малым, что в некоторых ситуациях электродвигатель не сможет отработать задание (не сможет разогнать/затормозить двигатель за заданное время).
Это приводит к увеличению тока электродвигателя до тех пор, пока не будет достигнут предел по току. В случае малого времени замедления (t -а) напряжение промежуточной цепи способно возрасти до такого уровня, что схема защиты преобразователя частоты остановит преобразователь.
Оптимальное время изменения скорости можно вычислить по приведенным ниже формулам.
t a = J x n/[(T N -T fric)x9,55]
t -a = J x n/[(T N +T fric)x9,55]
t a - время увеличения скорости
t -a - время уменьшения скорости
n - число оборотов
T N - номинальный крутящий момент электродвигателя
T fric - момент трения

Рис. 18. Установка времени изменения скорости
Время разгона/торможения обычно выбирается исходя из номинальной скорости электродвигателя.
Текущий контроль
Преобразователи частоты могут контролировать регулируемый процесс и вмешиваться в него при неисправности.
Такой контроль может быть разделен на три вида в зависимости от объекта: контроль технологической установки, контроль электродвигателя и контроль преобразователя частоты.
Контроль установки основан на контроле выходной частоты, выходного тока и крутящего момента электродвигателя. На основании этих параметров можно устанавливать несколько пределов, превышение которых воздействует на функцию управления. Этими пределами могут быть допустимая наименьшая скорость электродвигателя (минимальная частота), допустимый наибольший ток (предел по току) или допустимый наибольший крутящий момент электродвигателя (предельный крутящий момент).
Преобразователь частоты может быть запрограммирован, например, на подачу предупреждающего сигнала, уменьшение скорости электродвигателя или останов последнего в случае выхода его скорости за установленные пределы.
Пример
В установках, использующих для соединения электродвигателя с остальной частью системы клиновой ремень, преобразователь частоты может программироваться на контроль состояния этого ремня.
Поскольку в случае разрыва ремня выходная частота будет увеличиваться быстрее, чем определяется заданной рампой, в таких ситуациях можно использовать эту частоту для подачи предупреждения или останова электродвигателя.
Контроль электродвигателя можно производить с помощью преобразователя частоты путем мониторинга тепловой модели электродвигателя или путем подключения к электродвигателю термистора. Преобразователь частоты может предотвращать перегрузку электродвигателя, действуя подобно термореле. В вычислениях, производимых преобразователем частоты, участвует и выходная частота. Это гарантирует, что электродвигатель не будет перегружаться на малых скоростях из-за ухудшения внутренней вентиляции. Современные преобразователи частоты также способны защищать электродвигатели с принудительной вентиляцией, если ток становится слишком большим.
Контроль преобразователя частоты традиционно производится таким образом, что в случае перегрузки по току преобразователь отключается. Некоторые преобразователи допускают кратковременную перегрузку по току. Микропроцессор в преобразователе частоты способен одновременно учитывать значение тока электродвигателя и время его приложения, что обеспечивает возможность оптимального использования преобразователя частоты без перегрузки.
По материалам Danfoss











